




机器人视觉引导定位技术被广泛运用于机器人工业制造中,目的在于提升机器人在作业中的精准性与稳定性。传统机器人因为缺乏定位系统,无法准确识别产品所在方向,在产品的抓取、放置作业中经常出现误差,不能精准地抓取产品。
双目视觉立体方法采用两台相机从不同的位置获取被测物体的两幅图像,通过计算两幅图像对应点间的位置偏差,来获取被测物体三维几何信息的方法。
该项技术在机器人视觉、车辆自主驾驶、多自由度机械装置控制、非接触自动在线检测等领域均具有很大的应用价值。 三维重建一直是计算机视觉的重要研究领域之一。
北京盈美智研发设计的双目视觉立体定位软件已成功应用于磨具装配行业。
北京盈美智研发设计的双目视觉立体定位系统采用两套双目相机(SM1左、SM1右、SM2左、SM2右)对空间中的上模具,中模具,下模具进行定位,告知机械手系统它们的三位坐标(x,y, z),机械手根据坐标完成三模具的装配工作。
双目视觉立体定位软件
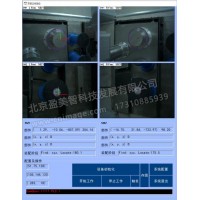
一、主界面,主要包括图像显示、坐标显示、程序操作等,如图1。

图1:主界面
二、系统配置,主要包括相机配置、相机标定、定位配置、通讯配置、杂项配置。如图2。
图2:系统配置
三、相机配置,包括仿真模式选择、手动采集模式选择、采集间隔、相机选择、工作模式、曝光时间、相机增益、白平衡、ROI区域等,ROI区域可通过直接输入数值位置设置(如图3),也可以通过鼠标操作设置。
图3:直接输入数值位置设置ROI区域
四、相机标定,主要包括设备选择、标定方式、标定参数、添加图像、标定相机、坐标标定、坐标偏差修正等,如图4。
图4:相机标定
五、定位配置,主要包括色环颜色、边界策略、图像缩放、匹配精度等。如图5。
图5:定位配置
六、通讯配置,如图6。
图6:通讯配置
七、杂项配置,主要包括绘制最终结果、绘制候选椭圆、绘制候选边界。如图7和图8。
图7:杂项配置
图8:绘制结果图
北京盈美智科技发展有限公司自2000年成立以来,一直致力于机器视觉领域,提供图像处理分析、机器视觉应用等全方位解决方案。
公司代理销售国际知名厂商的工业相机、图像采集卡、光源及图像处理模块等视觉产品,还可根据用户的实际要求,进行从硬件到软件的全套图像处理系统集成及图像处理软件定制服务。